




ವಿನ್ಯಾಸಫೋಟೋನಿಕ್ಸಂಯೋಜಿತ ಸರ್ಕ್ಯೂಟ್
ಫೋಟೊನಿಕ್ ಇಂಟಿಗ್ರೇಟೆಡ್ ಸರ್ಕ್ಯೂಟ್ಗಳು(PIC) ಗಳನ್ನು ಇಂಟರ್ಫೆರೋಮೀಟರ್ಗಳಲ್ಲಿ ಅಥವಾ ಮಾರ್ಗದ ಉದ್ದಕ್ಕೆ ಸೂಕ್ಷ್ಮವಾಗಿರುವ ಇತರ ಅನ್ವಯಿಕೆಗಳಲ್ಲಿ ಮಾರ್ಗದ ಉದ್ದದ ಪ್ರಾಮುಖ್ಯತೆಯ ಕಾರಣದಿಂದಾಗಿ ಗಣಿತದ ಲಿಪಿಗಳ ಸಹಾಯದಿಂದ ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗುತ್ತದೆ.ಚಿತ್ರಇದನ್ನು ವೇಫರ್ನಲ್ಲಿ ಬಹು ಪದರಗಳನ್ನು (ಸಾಮಾನ್ಯವಾಗಿ 10 ರಿಂದ 30) ಪ್ಯಾಟರ್ ಮಾಡುವ ಮೂಲಕ ತಯಾರಿಸಲಾಗುತ್ತದೆ, ಇವು ಅನೇಕ ಬಹುಭುಜಾಕೃತಿಯ ಆಕಾರಗಳಿಂದ ಕೂಡಿದ್ದು, ಇವುಗಳನ್ನು ಹೆಚ್ಚಾಗಿ GDSII ಸ್ವರೂಪದಲ್ಲಿ ಪ್ರತಿನಿಧಿಸಲಾಗುತ್ತದೆ. ಫೋಟೊಮಾಸ್ಕ್ ತಯಾರಕರಿಗೆ ಫೈಲ್ ಅನ್ನು ಕಳುಹಿಸುವ ಮೊದಲು, ವಿನ್ಯಾಸದ ಸರಿಯಾದತೆಯನ್ನು ಪರಿಶೀಲಿಸಲು PIC ಅನ್ನು ಅನುಕರಿಸಲು ಸಾಧ್ಯವಾಗುವುದು ಬಲವಾಗಿ ಅಪೇಕ್ಷಣೀಯವಾಗಿದೆ. ಸಿಮ್ಯುಲೇಶನ್ ಅನ್ನು ಬಹು ಹಂತಗಳಾಗಿ ವಿಂಗಡಿಸಲಾಗಿದೆ: ಕಡಿಮೆ ಮಟ್ಟವು ಮೂರು ಆಯಾಮದ ವಿದ್ಯುತ್ಕಾಂತೀಯ (EM) ಸಿಮ್ಯುಲೇಶನ್ ಆಗಿದೆ, ಅಲ್ಲಿ ಸಿಮ್ಯುಲೇಶನ್ ಅನ್ನು ಉಪ-ತರಂಗಾಂತರ ಮಟ್ಟದಲ್ಲಿ ನಡೆಸಲಾಗುತ್ತದೆ, ಆದಾಗ್ಯೂ ವಸ್ತುವಿನಲ್ಲಿರುವ ಪರಮಾಣುಗಳ ನಡುವಿನ ಪರಸ್ಪರ ಕ್ರಿಯೆಗಳನ್ನು ಮ್ಯಾಕ್ರೋಸ್ಕೋಪಿಕ್ ಮಾಪಕದಲ್ಲಿ ನಿರ್ವಹಿಸಲಾಗುತ್ತದೆ. ವಿಶಿಷ್ಟ ವಿಧಾನಗಳಲ್ಲಿ ಮೂರು ಆಯಾಮದ ಸೀಮಿತ-ವ್ಯತ್ಯಾಸ ಸಮಯ-ಡೊಮೇನ್ (3D FDTD) ಮತ್ತು ಐಜೆನ್ಮೋಡ್ ವಿಸ್ತರಣೆ (EME) ಸೇರಿವೆ. ಈ ವಿಧಾನಗಳು ಅತ್ಯಂತ ನಿಖರವಾಗಿರುತ್ತವೆ, ಆದರೆ ಸಂಪೂರ್ಣ PIC ಸಿಮ್ಯುಲೇಶನ್ ಸಮಯಕ್ಕೆ ಅಪ್ರಾಯೋಗಿಕವಾಗಿವೆ. ಮುಂದಿನ ಹಂತವು ಸೀಮಿತ-ವ್ಯತ್ಯಾಸ ಕಿರಣ ಪ್ರಸರಣ (FD-BPM) ನಂತಹ 2.5-ಆಯಾಮದ EM ಸಿಮ್ಯುಲೇಶನ್ ಆಗಿದೆ. ಈ ವಿಧಾನಗಳು ಹೆಚ್ಚು ವೇಗವಾಗಿರುತ್ತವೆ, ಆದರೆ ಕೆಲವು ನಿಖರತೆಯನ್ನು ತ್ಯಾಗ ಮಾಡುತ್ತವೆ ಮತ್ತು ಪ್ಯಾರಾಕ್ಸಿಯಲ್ ಪ್ರಸರಣವನ್ನು ಮಾತ್ರ ನಿರ್ವಹಿಸಬಲ್ಲವು ಮತ್ತು ಉದಾಹರಣೆಗೆ ರೆಸೋನೇಟರ್ಗಳನ್ನು ಅನುಕರಿಸಲು ಬಳಸಲಾಗುವುದಿಲ್ಲ. ಮುಂದಿನ ಹಂತವು 2D FDTD ಮತ್ತು 2D BPM ನಂತಹ 2D EM ಸಿಮ್ಯುಲೇಶನ್ ಆಗಿದೆ. ಇವುಗಳು ಸಹ ವೇಗವಾಗಿರುತ್ತವೆ, ಆದರೆ ಸೀಮಿತ ಕಾರ್ಯವನ್ನು ಹೊಂದಿವೆ, ಉದಾಹರಣೆಗೆ ಅವು ಧ್ರುವೀಕರಣ ಆವರ್ತಕಗಳನ್ನು ಅನುಕರಿಸಲು ಸಾಧ್ಯವಿಲ್ಲ. ಇನ್ನೊಂದು ಹಂತವೆಂದರೆ ಪ್ರಸರಣ ಮತ್ತು/ಅಥವಾ ಸ್ಕ್ಯಾಟರಿಂಗ್ ಮ್ಯಾಟ್ರಿಕ್ಸ್ ಸಿಮ್ಯುಲೇಶನ್. ಪ್ರತಿಯೊಂದು ಪ್ರಮುಖ ಘಟಕವನ್ನು ಇನ್ಪುಟ್ ಮತ್ತು ಔಟ್ಪುಟ್ನೊಂದಿಗೆ ಒಂದು ಘಟಕಕ್ಕೆ ಇಳಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಸಂಪರ್ಕಿತ ವೇವ್ಗೈಡ್ ಅನ್ನು ಹಂತ ಶಿಫ್ಟ್ ಮತ್ತು ಅಟೆನ್ಯೂಯೇಷನ್ ಅಂಶಕ್ಕೆ ಇಳಿಸಲಾಗುತ್ತದೆ. ಈ ಸಿಮ್ಯುಲೇಶನ್ಗಳು ಅತ್ಯಂತ ವೇಗವಾಗಿರುತ್ತವೆ. ಇನ್ಪುಟ್ ಸಿಗ್ನಲ್ ಅನ್ನು ಇನ್ಪುಟ್ ಸಿಗ್ನಲ್ನಿಂದ ಟ್ರಾನ್ಸ್ಮಿಷನ್ ಮ್ಯಾಟ್ರಿಕ್ಸ್ ಅನ್ನು ಗುಣಿಸುವ ಮೂಲಕ ಪಡೆಯಲಾಗುತ್ತದೆ. ಸ್ಕ್ಯಾಟರಿಂಗ್ ಮ್ಯಾಟ್ರಿಕ್ಸ್ (ಇದರ ಅಂಶಗಳನ್ನು S-ಪ್ಯಾರಾಮೀಟರ್ಗಳು ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ) ಘಟಕದ ಇನ್ನೊಂದು ಬದಿಯಲ್ಲಿ ಇನ್ಪುಟ್ ಮತ್ತು ಔಟ್ಪುಟ್ ಸಿಗ್ನಲ್ಗಳನ್ನು ಕಂಡುಹಿಡಿಯಲು ಒಂದು ಬದಿಯಲ್ಲಿ ಇನ್ಪುಟ್ ಮತ್ತು ಔಟ್ಪುಟ್ ಸಿಗ್ನಲ್ಗಳನ್ನು ಗುಣಿಸುತ್ತದೆ. ಮೂಲತಃ, ಸ್ಕ್ಯಾಟರಿಂಗ್ ಮ್ಯಾಟ್ರಿಕ್ಸ್ ಅಂಶದ ಒಳಗೆ ಪ್ರತಿಫಲನವನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಸ್ಕ್ಯಾಟರಿಂಗ್ ಮ್ಯಾಟ್ರಿಕ್ಸ್ ಸಾಮಾನ್ಯವಾಗಿ ಪ್ರತಿ ಆಯಾಮದಲ್ಲಿ ಟ್ರಾನ್ಸ್ಮಿಷನ್ ಮ್ಯಾಟ್ರಿಕ್ಸ್ಗಿಂತ ಎರಡು ಪಟ್ಟು ದೊಡ್ಡದಾಗಿದೆ. ಸಂಕ್ಷಿಪ್ತವಾಗಿ ಹೇಳುವುದಾದರೆ, 3D EM ನಿಂದ ಟ್ರಾನ್ಸ್ಮಿಷನ್/ಸ್ಕ್ಯಾಟರಿಂಗ್ ಮ್ಯಾಟ್ರಿಕ್ಸ್ ಸಿಮ್ಯುಲೇಶನ್ವರೆಗೆ, ಸಿಮ್ಯುಲೇಶನ್ನ ಪ್ರತಿಯೊಂದು ಪದರವು ವೇಗ ಮತ್ತು ನಿಖರತೆಯ ನಡುವಿನ ರಾಜಿ-ವಹಿವಾಟನ್ನು ಒದಗಿಸುತ್ತದೆ ಮತ್ತು ವಿನ್ಯಾಸಕರು ವಿನ್ಯಾಸ ಮೌಲ್ಯೀಕರಣ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಅತ್ಯುತ್ತಮವಾಗಿಸಲು ತಮ್ಮ ನಿರ್ದಿಷ್ಟ ಅಗತ್ಯಗಳಿಗಾಗಿ ಸರಿಯಾದ ಮಟ್ಟದ ಸಿಮ್ಯುಲೇಶನ್ ಅನ್ನು ಆಯ್ಕೆ ಮಾಡುತ್ತಾರೆ.
ಆದಾಗ್ಯೂ, ಕೆಲವು ಅಂಶಗಳ ವಿದ್ಯುತ್ಕಾಂತೀಯ ಸಿಮ್ಯುಲೇಶನ್ ಅನ್ನು ಅವಲಂಬಿಸಿರುವುದು ಮತ್ತು ಸಂಪೂರ್ಣ PIC ಅನ್ನು ಅನುಕರಿಸಲು ಸ್ಕ್ಯಾಟರಿಂಗ್/ಟ್ರಾನ್ಸ್ಫರ್ ಮ್ಯಾಟ್ರಿಕ್ಸ್ ಅನ್ನು ಬಳಸುವುದರಿಂದ ಹರಿವಿನ ತಟ್ಟೆಯ ಮುಂದೆ ಸಂಪೂರ್ಣವಾಗಿ ಸರಿಯಾದ ವಿನ್ಯಾಸವನ್ನು ಖಾತರಿಪಡಿಸುವುದಿಲ್ಲ. ಉದಾಹರಣೆಗೆ, ತಪ್ಪಾಗಿ ಲೆಕ್ಕಹಾಕಿದ ಮಾರ್ಗದ ಉದ್ದಗಳು, ಹೈ-ಆರ್ಡರ್ ಮೋಡ್ಗಳನ್ನು ಪರಿಣಾಮಕಾರಿಯಾಗಿ ನಿಗ್ರಹಿಸಲು ವಿಫಲವಾದ ಮಲ್ಟಿಮೋಡ್ ವೇವ್ಗೈಡ್ಗಳು ಅಥವಾ ಅನಿರೀಕ್ಷಿತ ಜೋಡಣೆ ಸಮಸ್ಯೆಗಳಿಗೆ ಕಾರಣವಾಗುವ ಪರಸ್ಪರ ಹತ್ತಿರವಿರುವ ಎರಡು ವೇವ್ಗೈಡ್ಗಳು ಸಿಮ್ಯುಲೇಶನ್ ಸಮಯದಲ್ಲಿ ಪತ್ತೆಯಾಗದೆ ಹೋಗುವ ಸಾಧ್ಯತೆಯಿದೆ. ಆದ್ದರಿಂದ, ಸುಧಾರಿತ ಸಿಮ್ಯುಲೇಶನ್ ಪರಿಕರಗಳು ಪ್ರಬಲ ವಿನ್ಯಾಸ ಮೌಲ್ಯೀಕರಣ ಸಾಮರ್ಥ್ಯಗಳನ್ನು ಒದಗಿಸುತ್ತವೆಯಾದರೂ, ವಿನ್ಯಾಸದ ನಿಖರತೆ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹತೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಮತ್ತು ಹರಿವಿನ ಹಾಳೆಯ ಅಪಾಯವನ್ನು ಕಡಿಮೆ ಮಾಡಲು ಪ್ರಾಯೋಗಿಕ ಅನುಭವ ಮತ್ತು ತಾಂತ್ರಿಕ ಜ್ಞಾನದೊಂದಿಗೆ ವಿನ್ಯಾಸಕರಿಂದ ಹೆಚ್ಚಿನ ಮಟ್ಟದ ಜಾಗರೂಕತೆ ಮತ್ತು ಎಚ್ಚರಿಕೆಯ ಪರಿಶೀಲನೆಯ ಅಗತ್ಯವಿರುತ್ತದೆ.
ಸ್ಪಾರ್ಸ್ FDTD ಎಂಬ ತಂತ್ರವು ವಿನ್ಯಾಸವನ್ನು ಮೌಲ್ಯೀಕರಿಸಲು ಸಂಪೂರ್ಣ PIC ವಿನ್ಯಾಸದ ಮೇಲೆ 3D ಮತ್ತು 2D FDTD ಸಿಮ್ಯುಲೇಶನ್ಗಳನ್ನು ನೇರವಾಗಿ ನಿರ್ವಹಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ. ಯಾವುದೇ ವಿದ್ಯುತ್ಕಾಂತೀಯ ಸಿಮ್ಯುಲೇಶನ್ ಉಪಕರಣವು ಬಹಳ ದೊಡ್ಡ ಪ್ರಮಾಣದ PIC ಅನ್ನು ಅನುಕರಿಸುವುದು ಕಷ್ಟಕರವಾಗಿದ್ದರೂ, ಸ್ಪಾರ್ಸ್ FDTD ಸಾಕಷ್ಟು ದೊಡ್ಡ ಸ್ಥಳೀಯ ಪ್ರದೇಶವನ್ನು ಅನುಕರಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ. ಸಾಂಪ್ರದಾಯಿಕ 3D FDTD ಯಲ್ಲಿ, ನಿರ್ದಿಷ್ಟ ಪರಿಮಾಣೀಕೃತ ಪರಿಮಾಣದೊಳಗೆ ವಿದ್ಯುತ್ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ಆರು ಘಟಕಗಳನ್ನು ಪ್ರಾರಂಭಿಸುವ ಮೂಲಕ ಸಿಮ್ಯುಲೇಶನ್ ಪ್ರಾರಂಭವಾಗುತ್ತದೆ. ಸಮಯ ಮುಂದುವರೆದಂತೆ, ಪರಿಮಾಣದಲ್ಲಿನ ಹೊಸ ಕ್ಷೇತ್ರ ಘಟಕವನ್ನು ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ, ಮತ್ತು ಹೀಗೆ. ಪ್ರತಿ ಹಂತಕ್ಕೂ ಬಹಳಷ್ಟು ಲೆಕ್ಕಾಚಾರದ ಅಗತ್ಯವಿರುತ್ತದೆ, ಆದ್ದರಿಂದ ಇದು ಬಹಳ ಸಮಯ ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ. ಸ್ಪಾರ್ಸ್ 3D FDTD ಯಲ್ಲಿ, ಪರಿಮಾಣದ ಪ್ರತಿಯೊಂದು ಹಂತದಲ್ಲಿ ಪ್ರತಿ ಹಂತದಲ್ಲಿ ಲೆಕ್ಕಾಚಾರ ಮಾಡುವ ಬದಲು, ಸೈದ್ಧಾಂತಿಕವಾಗಿ ಅನಿಯಂತ್ರಿತವಾಗಿ ದೊಡ್ಡ ಪರಿಮಾಣಕ್ಕೆ ಹೊಂದಿಕೆಯಾಗುವ ಮತ್ತು ಆ ಘಟಕಗಳಿಗೆ ಮಾತ್ರ ಲೆಕ್ಕಹಾಕಬಹುದಾದ ಕ್ಷೇತ್ರ ಘಟಕಗಳ ಪಟ್ಟಿಯನ್ನು ನಿರ್ವಹಿಸಲಾಗುತ್ತದೆ. ಪ್ರತಿ ಸಮಯದ ಹಂತದಲ್ಲಿ, ಕ್ಷೇತ್ರ ಘಟಕಗಳ ಪಕ್ಕದಲ್ಲಿರುವ ಬಿಂದುಗಳನ್ನು ಸೇರಿಸಲಾಗುತ್ತದೆ, ಆದರೆ ನಿರ್ದಿಷ್ಟ ವಿದ್ಯುತ್ ಮಿತಿಗಿಂತ ಕೆಳಗಿನ ಕ್ಷೇತ್ರ ಘಟಕಗಳನ್ನು ಕೈಬಿಡಲಾಗುತ್ತದೆ. ಕೆಲವು ರಚನೆಗಳಿಗೆ, ಈ ಲೆಕ್ಕಾಚಾರವು ಸಾಂಪ್ರದಾಯಿಕ 3D FDTD ಗಿಂತ ಹಲವಾರು ಆದೇಶಗಳ ವೇಗವಾಗಿರಬಹುದು. ಆದಾಗ್ಯೂ, ಪ್ರಸರಣ ರಚನೆಗಳೊಂದಿಗೆ ವ್ಯವಹರಿಸುವಾಗ ವಿರಳ FDTDS ಉತ್ತಮವಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವುದಿಲ್ಲ ಏಕೆಂದರೆ ಈ ಬಾರಿಯ ಕ್ಷೇತ್ರವು ತುಂಬಾ ಹರಡುತ್ತದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಪಟ್ಟಿಗಳು ತುಂಬಾ ಉದ್ದವಾಗಿರುತ್ತವೆ ಮತ್ತು ನಿರ್ವಹಿಸಲು ಕಷ್ಟಕರವಾಗಿರುತ್ತದೆ. ಚಿತ್ರ 1 ಧ್ರುವೀಕರಣ ಕಿರಣ ಸ್ಪ್ಲಿಟರ್ (PBS) ಗೆ ಹೋಲುವ 3D FDTD ಸಿಮ್ಯುಲೇಶನ್ನ ಉದಾಹರಣೆ ಸ್ಕ್ರೀನ್ಶಾಟ್ ಅನ್ನು ತೋರಿಸುತ್ತದೆ.
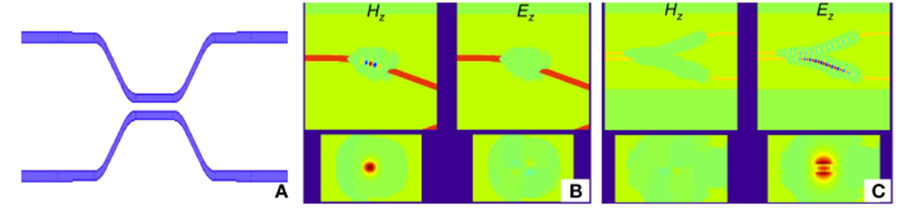
ಚಿತ್ರ 1: 3D ಸ್ಪಾರ್ಸ್ FDTD ಯಿಂದ ಸಿಮ್ಯುಲೇಶನ್ ಫಲಿತಾಂಶಗಳು. (A) ಎಂಬುದು ಸಿಮ್ಯುಲೇಟ್ ಮಾಡಲಾಗುತ್ತಿರುವ ರಚನೆಯ ಮೇಲಿನ ನೋಟವಾಗಿದೆ, ಇದು ದಿಕ್ಕಿನ ಸಂಯೋಜಕವಾಗಿದೆ. (B) ಕ್ವಾಸಿ-TE ಪ್ರಚೋದನೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಸಿಮ್ಯುಲೇಶನ್ನ ಸ್ಕ್ರೀನ್ಶಾಟ್ ಅನ್ನು ತೋರಿಸುತ್ತದೆ. ಮೇಲಿನ ಎರಡು ರೇಖಾಚಿತ್ರಗಳು ಕ್ವಾಸಿ-TE ಮತ್ತು ಕ್ವಾಸಿ-TM ಸಂಕೇತಗಳ ಮೇಲಿನ ನೋಟವನ್ನು ತೋರಿಸುತ್ತವೆ ಮತ್ತು ಕೆಳಗಿನ ಎರಡು ರೇಖಾಚಿತ್ರಗಳು ಅನುಗುಣವಾದ ಅಡ್ಡ-ವಿಭಾಗದ ನೋಟವನ್ನು ತೋರಿಸುತ್ತವೆ. (C) ಕ್ವಾಸಿ-TM ಪ್ರಚೋದನೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಸಿಮ್ಯುಲೇಶನ್ನ ಸ್ಕ್ರೀನ್ಶಾಟ್ ಅನ್ನು ತೋರಿಸುತ್ತದೆ.
ಪೋಸ್ಟ್ ಸಮಯ: ಜುಲೈ-23-2024