




ಅಲ್ಟ್ರಾ ಹೈ ಪ್ರಿಸಿಶನ್ MZM ಮಾಡ್ಯುಲೇಟರ್ ಬಯಾಸ್ ಕಂಟ್ರೋಲರ್ ಸ್ವಯಂಚಾಲಿತ ಬಯಾಸ್ ಕಂಟ್ರೋಲರ್


ವೈಶಿಷ್ಟ್ಯ
• ಪೀಕ್/ನಲ್/ಕ್ಯೂ+/ಕ್ಯೂ− ನಲ್ಲಿ ಬಯಾಸ್ ವೋಲ್ಟೇಜ್ ನಿಯಂತ್ರಣ
• ಅನಿಯಂತ್ರಿತ ಬಿಂದುವಿನ ಮೇಲೆ ಪಕ್ಷಪಾತ ವೋಲ್ಟೇಜ್ ನಿಯಂತ್ರಣ
• ಅತಿ ನಿಖರವಾದ ನಿಯಂತ್ರಣ: ಶೂನ್ಯ ಮೋಡ್ನಲ್ಲಿ 50dB ಗರಿಷ್ಠ ಅಳಿವಿನ ಅನುಪಾತ;
Q+ ಮತ್ತು Q− ವಿಧಾನಗಳಲ್ಲಿ ±0.5◦ ನಿಖರತೆ
• ಕಡಿಮೆ ಡಿಥರ್ ವೈಶಾಲ್ಯ:
NULL ಮೋಡ್ ಮತ್ತು PEAK ಮೋಡ್ನಲ್ಲಿ 0.1% Vπ
Q+ ಮೋಡ್ನಲ್ಲಿ 2% Vπ ಮತ್ತು Q− ಮೋಡ್ನಲ್ಲಿ
• ಹೆಚ್ಚಿನ ಸ್ಥಿರತೆ: ಸಂಪೂರ್ಣ ಡಿಜಿಟಲ್ ಅನುಷ್ಠಾನದೊಂದಿಗೆ
• ಕಡಿಮೆ ಪ್ರೊಫೈಲ್: 40mm(W) × 30mm(D) × 10mm(H)
• ಬಳಸಲು ಸುಲಭ: ಮಿನಿ ಜಂಪರ್ನೊಂದಿಗೆ ಹಸ್ತಚಾಲಿತ ಕಾರ್ಯಾಚರಣೆ;
MCU UART2 ಮೂಲಕ ಹೊಂದಿಕೊಳ್ಳುವ OEM ಕಾರ್ಯಾಚರಣೆಗಳು
• ಬಯಾಸ್ ವೋಲ್ಟೇಜ್ ಒದಗಿಸಲು ಎರಡು ವಿಭಿನ್ನ ವಿಧಾನಗಳು: a. ಸ್ವಯಂಚಾಲಿತ ಬಯಾಸ್ ನಿಯಂತ್ರಣ
ಬಿ. ಬಳಕೆದಾರ-ವ್ಯಾಖ್ಯಾನಿತ ಬಯಾಸ್ ವೋಲ್ಟೇಜ್

ಅಪ್ಲಿಕೇಶನ್
• LiNbO3 ಮತ್ತು ಇತರ MZ ಮಾಡ್ಯುಲೇಟರ್ಗಳು
• ಡಿಜಿಟಲ್ NRZ, RZ
• ಪಲ್ಸ್ ಅನ್ವಯಿಕೆಗಳು
• ಬ್ರಿಲೌಯಿನ್ ಸ್ಕ್ಯಾಟರಿಂಗ್ ಸಿಸ್ಟಮ್ ಮತ್ತು ಇತರ ಆಪ್ಟಿಕಲ್ ಸೆನ್ಸರ್ಗಳು
• CATV ಟ್ರಾನ್ಸ್ಮಿಟರ್
ಕಾರ್ಯಕ್ಷಮತೆ
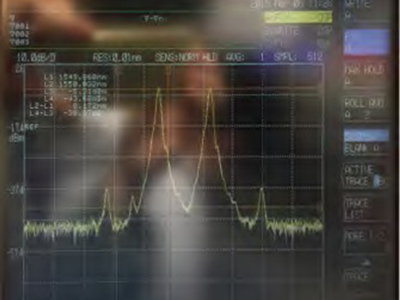
ಚಿತ್ರ 1. ವಾಹಕ ನಿಗ್ರಹ
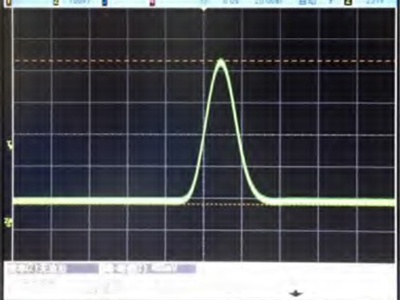
ಚಿತ್ರ 2. ಪಲ್ಸ್ ಜನರೇಷನ್

ಚಿತ್ರ 3. ಮಾಡ್ಯುಲೇಟರ್ ಗರಿಷ್ಠ ಶಕ್ತಿ
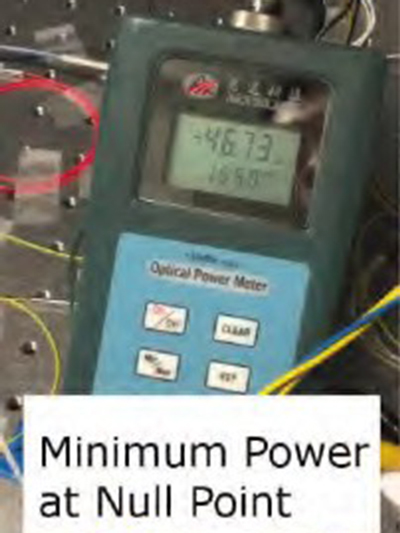
ಚಿತ್ರ 4. ಮಾಡ್ಯುಲೇಟರ್ ಕನಿಷ್ಠ ಶಕ್ತಿ
ಮ್ಯಾಕ್ಸಿಮ್ ಡಿಸಿ ಅಳಿವಿನ ಅನುಪಾತ
ಈ ಪ್ರಯೋಗದಲ್ಲಿ, ವ್ಯವಸ್ಥೆಗೆ ಯಾವುದೇ RF ಸಂಕೇತಗಳನ್ನು ಅನ್ವಯಿಸಲಾಗಿಲ್ಲ. ಶುದ್ಧ DC ಅಳಿವನ್ನು ಅಳೆಯಲಾಗಿದೆ.
1. ಚಿತ್ರ 5, ಪೀಕ್ ಪಾಯಿಂಟ್ನಲ್ಲಿ ಮಾಡ್ಯುಲೇಟರ್ ನಿಯಂತ್ರಿಸಲ್ಪಟ್ಟಾಗ, ಮಾಡ್ಯುಲೇಟರ್ ಔಟ್ಪುಟ್ನ ಆಪ್ಟಿಕಲ್ ಶಕ್ತಿಯನ್ನು ಪ್ರದರ್ಶಿಸುತ್ತದೆ. ಇದು ರೇಖಾಚಿತ್ರದಲ್ಲಿ 3.71dBm ಅನ್ನು ತೋರಿಸುತ್ತದೆ.
2. ಚಿತ್ರ 6 ಮಾಡ್ಯುಲೇಟರ್ ಅನ್ನು ಶೂನ್ಯ ಬಿಂದುವಿನಲ್ಲಿ ನಿಯಂತ್ರಿಸಿದಾಗ ಮಾಡ್ಯುಲೇಟರ್ ಔಟ್ಪುಟ್ನ ಆಪ್ಟಿಕಲ್ ಶಕ್ತಿಯನ್ನು ತೋರಿಸುತ್ತದೆ. ಇದು ರೇಖಾಚಿತ್ರದಲ್ಲಿ -46.73dBm ಅನ್ನು ತೋರಿಸುತ್ತದೆ. ನೈಜ ಪ್ರಯೋಗದಲ್ಲಿ, ಮೌಲ್ಯವು -47dBm ಸುತ್ತಲೂ ಬದಲಾಗುತ್ತದೆ; ಮತ್ತು -46.73 ಸ್ಥಿರ ಮೌಲ್ಯವಾಗಿದೆ.
3. ಆದ್ದರಿಂದ, ಅಳತೆ ಮಾಡಲಾದ ಸ್ಥಿರ DC ಅಳಿವಿನ ಅನುಪಾತವು 50.4dB ಆಗಿದೆ.
ಹೆಚ್ಚಿನ ಅಳಿವಿನ ಅನುಪಾತಕ್ಕೆ ಅಗತ್ಯತೆಗಳು
1. ಸಿಸ್ಟಮ್ ಮಾಡ್ಯುಲೇಟರ್ ಹೆಚ್ಚಿನ ಅಳಿವಿನ ಅನುಪಾತವನ್ನು ಹೊಂದಿರಬೇಕು. ಸಿಸ್ಟಮ್ ಮಾಡ್ಯುಲೇಟರ್ನ ಗುಣಲಕ್ಷಣವು ಗರಿಷ್ಠ ಅಳಿವಿನ ಅನುಪಾತವನ್ನು ಸಾಧಿಸಬಹುದು ಎಂಬುದನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ.
2. ಮಾಡ್ಯುಲೇಟರ್ ಇನ್ಪುಟ್ ಬೆಳಕಿನ ಧ್ರುವೀಕರಣವನ್ನು ನೋಡಿಕೊಳ್ಳಬೇಕು. ಮಾಡ್ಯುಲೇಟರ್ಗಳು ಧ್ರುವೀಕರಣಕ್ಕೆ ಸೂಕ್ಷ್ಮವಾಗಿರುತ್ತವೆ. ಸರಿಯಾದ ಧ್ರುವೀಕರಣವು 10dB ಗಿಂತ ಹೆಚ್ಚಿನ ಅಳಿವಿನ ಅನುಪಾತವನ್ನು ಸುಧಾರಿಸಬಹುದು. ಪ್ರಯೋಗಾಲಯ ಪ್ರಯೋಗಗಳಲ್ಲಿ, ಸಾಮಾನ್ಯವಾಗಿ ಧ್ರುವೀಕರಣ ನಿಯಂತ್ರಕ ಅಗತ್ಯವಿರುತ್ತದೆ.
3. ಸರಿಯಾದ ಬಯಾಸ್ ನಿಯಂತ್ರಕಗಳು. ನಮ್ಮ DC ಅಳಿವಿನ ಅನುಪಾತ ಪ್ರಯೋಗದಲ್ಲಿ, 50.4dB ಅಳಿವಿನ ಅನುಪಾತವನ್ನು ಸಾಧಿಸಲಾಗಿದೆ. ಮಾಡ್ಯುಲೇಟರ್ ತಯಾರಿಕೆಯ ಡೇಟಾಶೀಟ್ 40dB ಅನ್ನು ಮಾತ್ರ ಪಟ್ಟಿ ಮಾಡುತ್ತದೆ. ಈ ಸುಧಾರಣೆಗೆ ಕಾರಣವೆಂದರೆ ಕೆಲವು ಮಾಡ್ಯುಲೇಟರ್ಗಳು ಬಹಳ ವೇಗವಾಗಿ ಚಲಿಸುತ್ತವೆ. ವೇಗದ ಟ್ರ್ಯಾಕ್ ಪ್ರತಿಕ್ರಿಯೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ರೋಫಿಯಾ R-BC-ANY ಬಯಾಸ್ ನಿಯಂತ್ರಕಗಳು ಪ್ರತಿ 1 ಸೆಕೆಂಡಿಗೆ ಬಯಾಸ್ ವೋಲ್ಟೇಜ್ ಅನ್ನು ನವೀಕರಿಸುತ್ತವೆ.
ವಿಶೇಷಣಗಳು
| ಪ್ಯಾರಾಮೀಟರ್ | ಕನಿಷ್ಠ | ಟೈಪ್ ಮಾಡಿ | ಗರಿಷ್ಠ | ಘಟಕ | ನಿಯಮಗಳು |
| ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ನಿಯಂತ್ರಿಸಿ | |||||
| ಅಳಿವಿನ ಅನುಪಾತ | ಮಾರ್ಚ್ ೧ | 50 | dB | ||
| ಸಿಎಸ್ಒ2 | −5 | −65 (ಆಂಕೆಲಸ) | −70 (−70) | ಡಿಬಿಸಿ | ಡಿಥರ್ ವೈಶಾಲ್ಯ: 2%Vπ |
| ಸ್ಥಿರೀಕರಣ ಸಮಯ | 4 | s | ಟ್ರ್ಯಾಕಿಂಗ್ ಪಾಯಿಂಟ್ಗಳು: ಶೂನ್ಯ ಮತ್ತು ಶಿಖರ | ||
| 10 | ಟ್ರ್ಯಾಕಿಂಗ್ ಪಾಯಿಂಟ್ಗಳು: Q+ & Q- | ||||
| ವಿದ್ಯುತ್ | |||||
| ಧನಾತ್ಮಕ ವಿದ್ಯುತ್ ವೋಲ್ಟೇಜ್ | +14.5 | +15 | +15.5 | V | |
| ಧನಾತ್ಮಕ ವಿದ್ಯುತ್ ಪ್ರವಾಹ | 20 | 30 | mA | ||
| ಋಣಾತ್ಮಕ ವಿದ್ಯುತ್ ವೋಲ್ಟೇಜ್ | -15.5 | -15 | -14.5 | V | |
| ನಕಾರಾತ್ಮಕ ವಿದ್ಯುತ್ ಪ್ರವಾಹ | 2 | 4 | mA | ||
| ಔಟ್ಪುಟ್ ವೋಲ್ಟೇಜ್ ಶ್ರೇಣಿ | -9.57 | +9.85 | V | ||
| ಔಟ್ಪುಟ್ ವೋಲ್ಟೇಜ್ ನಿಖರತೆ | 346 (ಆನ್ಲೈನ್) | µವಿ | |||
| ಡಿಥರ್ ಆವರ್ತನ | 999.95 (999.95) | 1000 | 1000.05 | Hz | ಆವೃತ್ತಿ: 1kHz ಡಿಥರ್ ಸಿಗ್ನಲ್ |
| ಡಿಥರ್ ವೈಶಾಲ್ಯ | 0.1% ವಿπ | V | ಟ್ರ್ಯಾಕಿಂಗ್ ಪಾಯಿಂಟ್ಗಳು: ಶೂನ್ಯ ಮತ್ತು ಶಿಖರ | ||
| 2% ವಿπ | ಟ್ರ್ಯಾಕಿಂಗ್ ಪಾಯಿಂಟ್ಗಳು: Q+ & Q- | ||||
| ಆಪ್ಟಿಕಲ್ | |||||
| ಇನ್ಪುಟ್ ಆಪ್ಟಿಕಲ್ ಪವರ್ 3 | -30 | -5 | ಡಿಬಿಎಂ | ||
| ಇನ್ಪುಟ್ ತರಂಗಾಂತರ | 780 | 2000 ವರ್ಷಗಳು | nm | ||
1. MER ಎಂದರೆ ಮಾಡ್ಯುಲೇಟರ್ ಅಳಿವಿನ ಅನುಪಾತ. ಸಾಧಿಸಲಾದ ಅಳಿವಿನ ಅನುಪಾತವು ಸಾಮಾನ್ಯವಾಗಿ ಮಾಡ್ಯುಲೇಟರ್ ಡೇಟಾಶೀಟ್ನಲ್ಲಿ ನಿರ್ದಿಷ್ಟಪಡಿಸಿದ ಮಾಡ್ಯುಲೇಟರ್ನ ಅಳಿವಿನ ಅನುಪಾತವಾಗಿರುತ್ತದೆ.
2. CSO ಎಂದರೆ ಸಂಯೋಜಿತ ಎರಡನೇ ಕ್ರಮಾಂಕ. CSO ಅನ್ನು ಸರಿಯಾಗಿ ಅಳೆಯಲು, RF ಸಿಗ್ನಲ್, ಮಾಡ್ಯುಲೇಟರ್ಗಳು ಮತ್ತು ರಿಸೀವರ್ಗಳ ರೇಖೀಯ ಗುಣಮಟ್ಟವನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಬೇಕು. ಇದರ ಜೊತೆಗೆ, ವಿಭಿನ್ನ RF ಆವರ್ತನಗಳಲ್ಲಿ ಚಾಲನೆಯಲ್ಲಿರುವಾಗ ಸಿಸ್ಟಮ್ CSO ವಾಚನಗೋಷ್ಠಿಗಳು ಬದಲಾಗಬಹುದು.
3. ಆಯ್ದ ಬಯಾಸ್ ಪಾಯಿಂಟ್ನಲ್ಲಿ ಇನ್ಪುಟ್ ಆಪ್ಟಿಕಲ್ ಪವರ್ ಆಪ್ಟಿಕಲ್ ಪವರ್ಗೆ ಹೊಂದಿಕೆಯಾಗುವುದಿಲ್ಲ ಎಂಬುದನ್ನು ದಯವಿಟ್ಟು ಗಮನಿಸಿ. ಬಯಾಸ್ ವೋಲ್ಟೇಜ್ −Vπ ನಿಂದ +Vπ ವರೆಗೆ ಇದ್ದಾಗ ಮಾಡ್ಯುಲೇಟರ್ ನಿಯಂತ್ರಕಕ್ಕೆ ರಫ್ತು ಮಾಡಬಹುದಾದ ಗರಿಷ್ಠ ಆಪ್ಟಿಕಲ್ ಪವರ್ ಅನ್ನು ಇದು ಸೂಚಿಸುತ್ತದೆ.
ಬಳಕೆದಾರ ಇಂಟರ್ಫೇಸ್
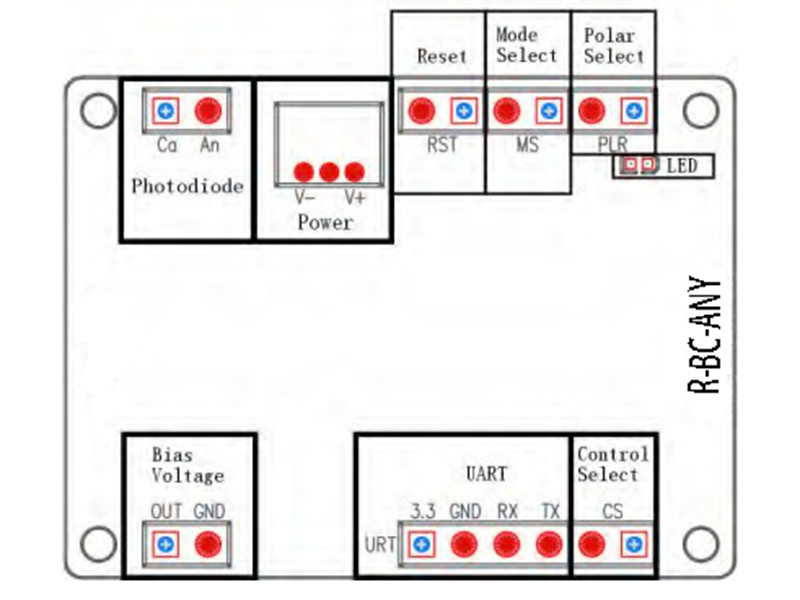
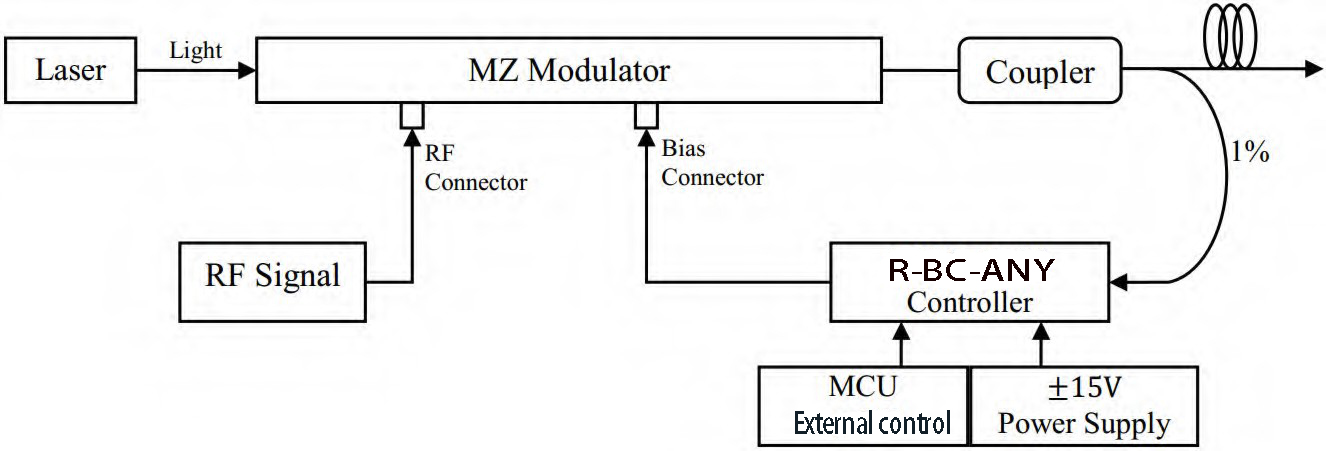
ಚಿತ್ರ 5. ಜೋಡಣೆ
| ಗುಂಪು | ಕಾರ್ಯಾಚರಣೆ | ವಿವರಣೆ |
| ಫೋಟೋಡಯೋಡ್ 1 | PD: MZM ಫೋಟೋಡಿಯೋಡ್ನ ಕ್ಯಾಥೋಡ್ ಅನ್ನು ಸಂಪರ್ಕಿಸಿ | ದ್ಯುತಿಪ್ರವಾಹ ಪ್ರತಿಕ್ರಿಯೆಯನ್ನು ಒದಗಿಸಿ |
| GND: MZM ಫೋಟೋಡಿಯೋಡ್ನ ಆನೋಡ್ ಅನ್ನು ಸಂಪರ್ಕಿಸಿ | ||
| ಶಕ್ತಿ | ಬಯಾಸ್ ನಿಯಂತ್ರಕಕ್ಕೆ ವಿದ್ಯುತ್ ಮೂಲ | V-: ಋಣಾತ್ಮಕ ವಿದ್ಯುದ್ವಾರವನ್ನು ಸಂಪರ್ಕಿಸುತ್ತದೆ |
| V+: ಧನಾತ್ಮಕ ವಿದ್ಯುದ್ವಾರವನ್ನು ಸಂಪರ್ಕಿಸುತ್ತದೆ | ||
| ಮಧ್ಯದ ತನಿಖೆ: ನೆಲದ ವಿದ್ಯುದ್ವಾರವನ್ನು ಸಂಪರ್ಕಿಸುತ್ತದೆ | ||
| ಮರುಹೊಂದಿಸಿ | ಜಂಪರ್ ಸೇರಿಸಿ ಮತ್ತು 1 ಸೆಕೆಂಡ್ ನಂತರ ಹೊರತೆಗೆಯಿರಿ | ನಿಯಂತ್ರಕವನ್ನು ಮರುಹೊಂದಿಸಿ |
| ಮೋಡ್ ಆಯ್ಕೆ | ಜಂಪರ್ ಅನ್ನು ಸೇರಿಸಿ ಅಥವಾ ಹೊರತೆಗೆಯಿರಿ | ಜಂಪರ್ ಇಲ್ಲ: ಶೂನ್ಯ ಮೋಡ್; ಜಂಪರ್ನೊಂದಿಗೆ: ಕ್ವಾಡ್ ಮೋಡ್ |
| ಪೋಲಾರ್ ಸೆಲೆಕ್ಟ್2 | ಜಂಪರ್ ಅನ್ನು ಸೇರಿಸಿ ಅಥವಾ ಹೊರತೆಗೆಯಿರಿ | ಜಿಗಿತಗಾರ ಇಲ್ಲ: ಧನಾತ್ಮಕ ಧ್ರುವ; ಜಿಗಿತಗಾರನೊಂದಿಗೆ: ಋಣಾತ್ಮಕ ಧ್ರುವ |
| ಬಯಾಸ್ ವೋಲ್ಟೇಜ್ | MZM ಬಯಾಸ್ ವೋಲ್ಟೇಜ್ ಪೋರ್ಟ್ನೊಂದಿಗೆ ಸಂಪರ್ಕಪಡಿಸಿ | OUT ಮತ್ತು GND ಮಾಡ್ಯುಲೇಟರ್ಗೆ ಬಯಾಸ್ ವೋಲ್ಟೇಜ್ಗಳನ್ನು ಒದಗಿಸುತ್ತವೆ. |
| ಎಲ್ಇಡಿ | ನಿರಂತರವಾಗಿ | ಸ್ಥಿರ ಸ್ಥಿತಿಯಲ್ಲಿ ಕೆಲಸ ಮಾಡುವುದು |
| ಪ್ರತಿ 0.2 ಸೆಕೆಂಡುಗಳಿಗೊಮ್ಮೆ ಆನ್-ಆಫ್ ಅಥವಾ ಆಫ್-ಆನ್ | ಡೇಟಾವನ್ನು ಸಂಸ್ಕರಿಸುವುದು ಮತ್ತು ನಿಯಂತ್ರಣ ಬಿಂದುವನ್ನು ಹುಡುಕುವುದು | |
| ಪ್ರತಿ 1 ಸೆಕೆಂಡಿಗೆ ಆನ್-ಆಫ್ ಅಥವಾ ಆಫ್-ಆನ್ | ಇನ್ಪುಟ್ ಆಪ್ಟಿಕಲ್ ಪವರ್ ತುಂಬಾ ದುರ್ಬಲವಾಗಿದೆ. | |
| ಪ್ರತಿ 3 ಸೆಕೆಂಡುಗಳಿಗೊಮ್ಮೆ ಆನ್-ಆಫ್ ಅಥವಾ ಆಫ್-ಆನ್ | ಇನ್ಪುಟ್ ಆಪ್ಟಿಕಲ್ ಪವರ್ ತುಂಬಾ ಪ್ರಬಲವಾಗಿದೆ. | |
| ಯುಎಆರ್ಟಿ | UART ಮೂಲಕ ನಿಯಂತ್ರಕವನ್ನು ನಿರ್ವಹಿಸಿ | 3.3: 3.3V ಉಲ್ಲೇಖ ವೋಲ್ಟೇಜ್ |
| GND: ನೆಲ | ||
| RX: ನಿಯಂತ್ರಕದ ಸ್ವೀಕೃತಿ | ||
| TX: ನಿಯಂತ್ರಕದ ಪ್ರಸರಣ | ||
| ನಿಯಂತ್ರಣ ಆಯ್ಕೆ | ಜಂಪರ್ ಅನ್ನು ಸೇರಿಸಿ ಅಥವಾ ಹೊರತೆಗೆಯಿರಿ | ಜಂಪರ್ ಇಲ್ಲ: ಜಂಪರ್ ನಿಯಂತ್ರಣ; ಜಂಪರ್ನೊಂದಿಗೆ: UART ನಿಯಂತ್ರಣ |
1. ಕೆಲವು MZ ಮಾಡ್ಯುಲೇಟರ್ಗಳು ಆಂತರಿಕ ಫೋಟೋಡಯೋಡ್ಗಳನ್ನು ಹೊಂದಿರುತ್ತವೆ. ನಿಯಂತ್ರಕದ ಫೋಟೋಡಯೋಡ್ ಬಳಸುವುದೋ ಅಥವಾ ಮಾಡ್ಯುಲೇಟರ್ನ ಆಂತರಿಕ ಫೋಟೋಡಯೋಡ್ ಬಳಸುವುದೋ ನಡುವೆ ನಿಯಂತ್ರಕ ಸೆಟಪ್ ಅನ್ನು ಆಯ್ಕೆ ಮಾಡಬೇಕು. ಪ್ರಯೋಗಾಲಯದ ಪ್ರಯೋಗಗಳಿಗೆ ನಿಯಂತ್ರಕದ ಫೋಟೋಡಯೋಡ್ ಅನ್ನು ಬಳಸಲು ಎರಡು ಕಾರಣಗಳಿಗಾಗಿ ಶಿಫಾರಸು ಮಾಡಲಾಗಿದೆ. ಮೊದಲನೆಯದಾಗಿ, ನಿಯಂತ್ರಕ ಫೋಟೋಡಯೋಡ್ ಗುಣಮಟ್ಟವನ್ನು ಖಚಿತಪಡಿಸಿದೆ. ಎರಡನೆಯದಾಗಿ, ಇನ್ಪುಟ್ ಬೆಳಕಿನ ಉದ್ದೇಶವನ್ನು ಹೊಂದಿಸುವುದು ಸುಲಭ. ಗಮನಿಸಿ: ಮಾಡ್ಯುಲೇಟರ್ನ ಆಂತರಿಕ ಫೋಟೋಡಯೋಡ್ ಅನ್ನು ಬಳಸುತ್ತಿದ್ದರೆ, ದಯವಿಟ್ಟು ಫೋಟೋಡಯೋಡ್ನ ಔಟ್ಪುಟ್ ಕರೆಂಟ್ ಇನ್ಪುಟ್ ಪವರ್ಗೆ ಕಟ್ಟುನಿಟ್ಟಾಗಿ ಅನುಪಾತದಲ್ಲಿದೆ ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಿ.
2. ನಲ್ ಕಂಟ್ರೋಲ್ ಮೋಡ್ (ಮೋಡ್ ಸೆಲೆಕ್ಟ್ ಪಿನ್ ನಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ) ಅಥವಾ ಕ್ವಾಡ್+ ನಲ್ಲಿ ಪೀಕ್ ಮತ್ತು ನಲ್ ನಡುವೆ ನಿಯಂತ್ರಣ ಬಿಂದುವನ್ನು ಬದಲಾಯಿಸಲು ಪೋಲಾರ್ ಪಿನ್ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.
ಮತ್ತು ಕ್ವಾಡ್- ಇನ್ ಕ್ವಾಡ್ ಕಂಟ್ರೋಲ್ ಮೋಡ್. ಪೋಲಾರ್ ಪಿನ್ನ ಜಂಪರ್ ಅನ್ನು ಸೇರಿಸದಿದ್ದರೆ, ನಿಯಂತ್ರಣ ಬಿಂದುವು ನಲ್ ಮೋಡ್ನಲ್ಲಿ ನಲ್ ಅಥವಾ ಕ್ವಾಡ್ ಮೋಡ್ನಲ್ಲಿ ಕ್ವಾಡ್+ ಆಗಿರುತ್ತದೆ. RF ವ್ಯವಸ್ಥೆಯ ವೈಶಾಲ್ಯವು ನಿಯಂತ್ರಣ ಬಿಂದುವಿನ ಮೇಲೂ ಪರಿಣಾಮ ಬೀರುತ್ತದೆ. ಯಾವುದೇ RF ಸಿಗ್ನಲ್ ಇಲ್ಲದಿದ್ದಾಗ ಅಥವಾ RF ಸಿಗ್ನಲ್ ವೈಶಾಲ್ಯವು ಚಿಕ್ಕದಾಗಿದ್ದಾಗ, ನಿಯಂತ್ರಕವು MS ಮತ್ತು PLR ಜಂಪರ್ ಆಯ್ಕೆ ಮಾಡಿದಂತೆ ಸರಿಯಾದ ಬಿಂದುವಿಗೆ ಕೆಲಸದ ಬಿಂದುವನ್ನು ಲಾಕ್ ಮಾಡಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ. RF ಸಿಗ್ನಲ್ ವೈಶಾಲ್ಯವು ನಿರ್ದಿಷ್ಟ ಮಿತಿಯನ್ನು ಮೀರಿದಾಗ, ವ್ಯವಸ್ಥೆಯ ಧ್ರುವವು ಬದಲಾಗುತ್ತದೆ, ಈ ಸಂದರ್ಭದಲ್ಲಿ, PLR ಹೆಡರ್ ವಿರುದ್ಧ ಸ್ಥಿತಿಯಲ್ಲಿರಬೇಕು, ಅಂದರೆ ಜಂಪರ್ ಇಲ್ಲದಿದ್ದರೆ ಸೇರಿಸಬೇಕು ಅಥವಾ ಸೇರಿಸಿದರೆ ಹೊರತೆಗೆಯಬೇಕು.
ವಿಶಿಷ್ಟ ಅಪ್ಲಿಕೇಶನ್
ನಿಯಂತ್ರಕವನ್ನು ಬಳಸಲು ಸುಲಭವಾಗಿದೆ.
ಹಂತ 1. ಸಂಯೋಜಕದ 1% ಪೋರ್ಟ್ ಅನ್ನು ನಿಯಂತ್ರಕದ ಫೋಟೋಡಯೋಡ್ಗೆ ಸಂಪರ್ಕಪಡಿಸಿ.
ಹಂತ 2. ನಿಯಂತ್ರಕದ ಬಯಾಸ್ ವೋಲ್ಟೇಜ್ ಔಟ್ಪುಟ್ ಅನ್ನು (SMA ಅಥವಾ 2.54mm 2-ಪಿನ್ ಹೆಡರ್ ಮೂಲಕ) ಮಾಡ್ಯುಲೇಟರ್ನ ಬಯಾಸ್ ಪೋರ್ಟ್ಗೆ ಸಂಪರ್ಕಪಡಿಸಿ.
ಹಂತ 3. +15V ಮತ್ತು -15V DC ವೋಲ್ಟೇಜ್ಗಳೊಂದಿಗೆ ನಿಯಂತ್ರಕವನ್ನು ಒದಗಿಸಿ.
ಹಂತ 4. ನಿಯಂತ್ರಕವನ್ನು ಮರುಹೊಂದಿಸಿ ಮತ್ತು ಅದು ಕೆಲಸ ಮಾಡಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ.
ಗಮನಿಸಿ: ನಿಯಂತ್ರಕವನ್ನು ಮರುಹೊಂದಿಸುವ ಮೊದಲು ಇಡೀ ವ್ಯವಸ್ಥೆಯ RF ಸಿಗ್ನಲ್ ಆನ್ ಆಗಿದೆಯೇ ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಿ.
ರೋಫಿಯಾ ಆಪ್ಟೋಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ ವಾಣಿಜ್ಯ ಎಲೆಕ್ಟ್ರೋ-ಆಪ್ಟಿಕ್ ಮಾಡ್ಯುಲೇಟರ್ಗಳು, ಫೇಸ್ ಮಾಡ್ಯುಲೇಟರ್ಗಳು, ಇಂಟೆನ್ಸಿಟಿ ಮಾಡ್ಯುಲೇಟರ್, ಫೋಟೋಡೆಕ್ಟರ್ಗಳು, ಲೇಸರ್ ಬೆಳಕಿನ ಮೂಲಗಳು, DFB ಲೇಸರ್ಗಳು, ಆಪ್ಟಿಕಲ್ ಆಂಪ್ಲಿಫೈಯರ್ಗಳು, EDFA, SLD ಲೇಸರ್, QPSK ಮಾಡ್ಯುಲೇಷನ್, ಪಲ್ಸ್ ಲೇಸರ್, ಲೈಟ್ ಡಿಟೆಕ್ಟರ್, ಬ್ಯಾಲೆನ್ಸ್ಡ್ ಫೋಟೋಡೆಕ್ಟರ್, ಲೇಸರ್ ಡ್ರೈವರ್, ಫೈಬರ್ ಆಪ್ಟಿಕ್ ಆಂಪ್ಲಿಫಯರ್, ಆಪ್ಟಿಕಲ್ ಪವರ್ ಮೀಟರ್, ಬ್ರಾಡ್ಬ್ಯಾಂಡ್ ಲೇಸರ್, ಟ್ಯೂನಬಲ್ ಲೇಸರ್, ಆಪ್ಟಿಕಲ್ ಡಿಟೆಕ್ಟರ್, ಲೇಸರ್ ಡಯೋಡ್ ಡ್ರೈವರ್, ಫೈಬರ್ ಆಂಪ್ಲಿಫಯರ್ಗಳ ಉತ್ಪನ್ನ ಶ್ರೇಣಿಯನ್ನು ನೀಡುತ್ತದೆ. 1*4 ಅರೇ ಫೇಸ್ ಮಾಡ್ಯುಲೇಟರ್ಗಳು, ಅಲ್ಟ್ರಾ-ಲೋ Vpi ಮತ್ತು ಅಲ್ಟ್ರಾ-ಹೈ ಎಕ್ಸ್ಟಿಂಕ್ಷನ್ ರೇಶಿಯೋ ಮಾಡ್ಯುಲೇಟರ್ಗಳಂತಹ ಕಸ್ಟಮೈಸೇಶನ್ಗಾಗಿ ನಾವು ಅನೇಕ ನಿರ್ದಿಷ್ಟ ಮಾಡ್ಯುಲೇಟರ್ಗಳನ್ನು ಸಹ ಒದಗಿಸುತ್ತೇವೆ, ಉದಾಹರಣೆಗೆ ಪ್ರಾಥಮಿಕವಾಗಿ ವಿಶ್ವವಿದ್ಯಾಲಯಗಳು ಮತ್ತು ಸಂಸ್ಥೆಗಳಲ್ಲಿ ಬಳಸಲಾಗುತ್ತದೆ.
ನಮ್ಮ ಉತ್ಪನ್ನಗಳು ನಿಮಗೆ ಮತ್ತು ನಿಮ್ಮ ಸಂಶೋಧನೆಗೆ ಸಹಾಯಕವಾಗುತ್ತವೆ ಎಂದು ಭಾವಿಸುತ್ತೇವೆ.


